【Arduino工作】Lego × Arduinoで作る 走行ロボット工作
「自分の手で作ったメカが、自分の書いたコードで、自律的に動く。」 そのシンプルな感動を追い求め、ArduinoでLegoを制御する自律走行ロボットの開発に取り組んできました。
デスク一面を埋め尽くすワイヤの山から、洗練された「製品」へと進化していくの記録。それは、数々のエラーと格闘し、一つひとつ課題を解決してきた「開発の軌跡」そのものです。
本稿では、プロトタイプから最終実装に至るまでの全行程を、詳細に解説します。
1. 基本的な走行メカニズム
このロボットは、シンプルな「前進」と「後退」の切り替えによって動作します。 通常時は、Legoモーターによるトルクで前方へと突き進みますが、常に前方の状況を赤外線センサーで監視しています。
2. 障害物検知と回避行動
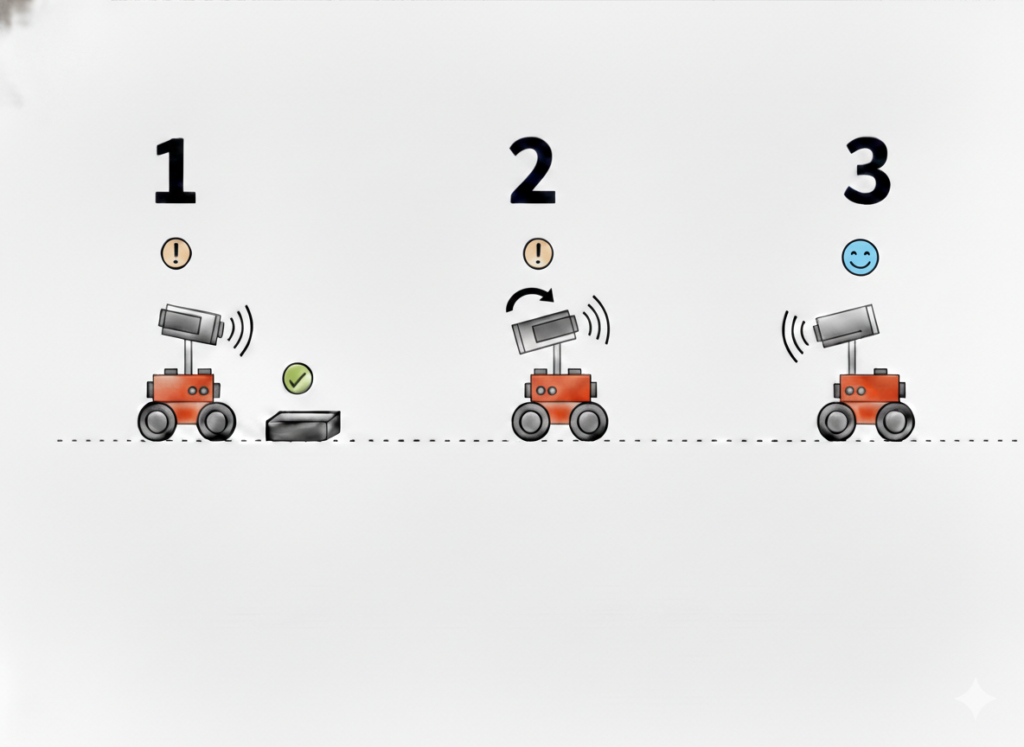
ロボットが前方に壁や障害物を検知すると、あらかじめ書き込まれた回避アルゴリズムが発動します。
- 検知と停止: センサーが一定距離内に障害物を捉えると、即座にモーターの回転をストップさせます。
- 後退による空間確保: 衝突を避けるため、一旦「バック(後退)」して障害物との距離を安全に確保します。
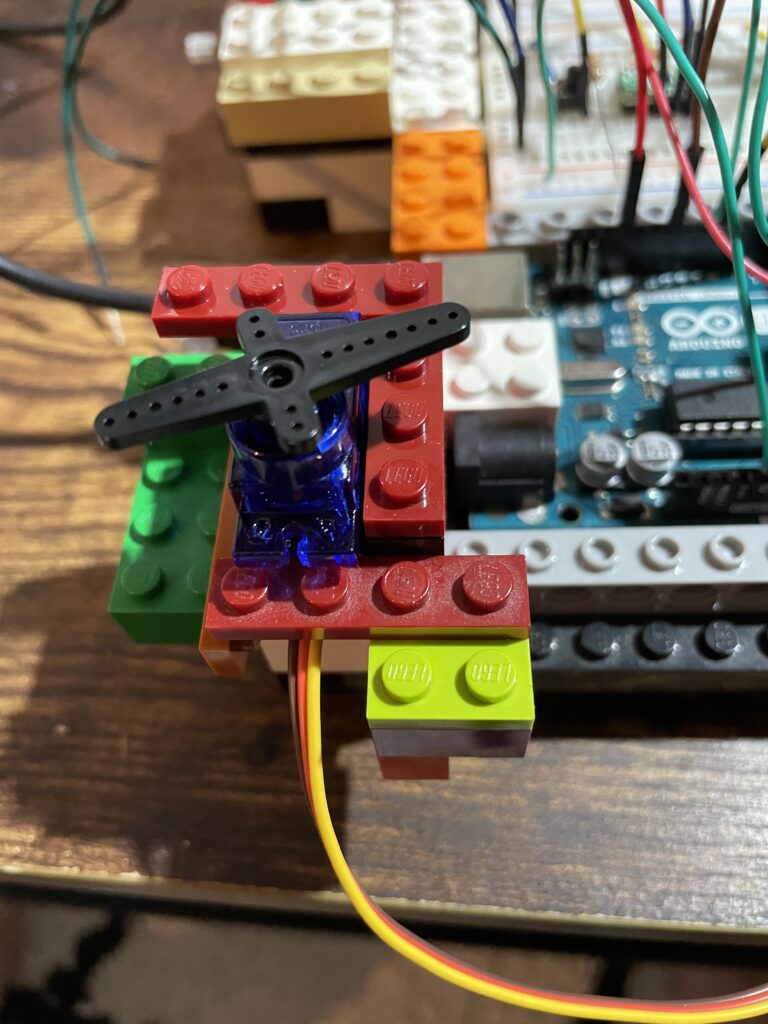
3. 180度回転する「視覚」
このロボットの最も特徴的な挙動が、センサー自体の動きです。障害物を検知して立ち止まった際、上部に設置された赤外線センサーがサーボモーターによって180度ぐるりと向きを変えます。 単に「ぶつからない」だけでなく、センサーを物理的にスイングさせます。
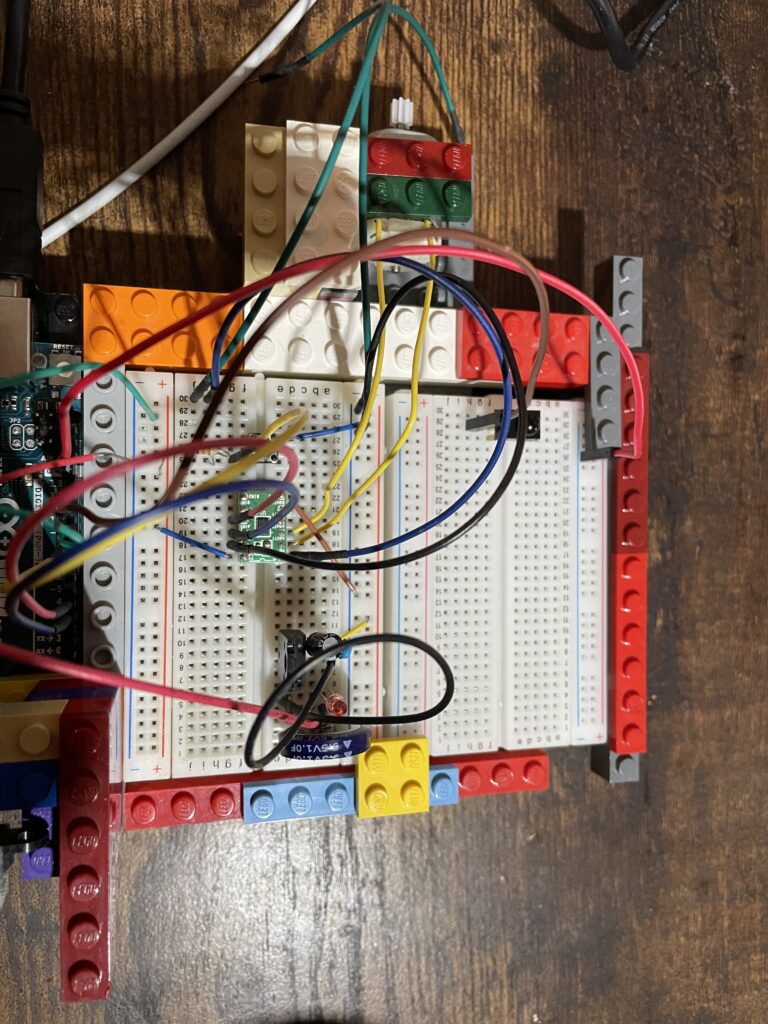
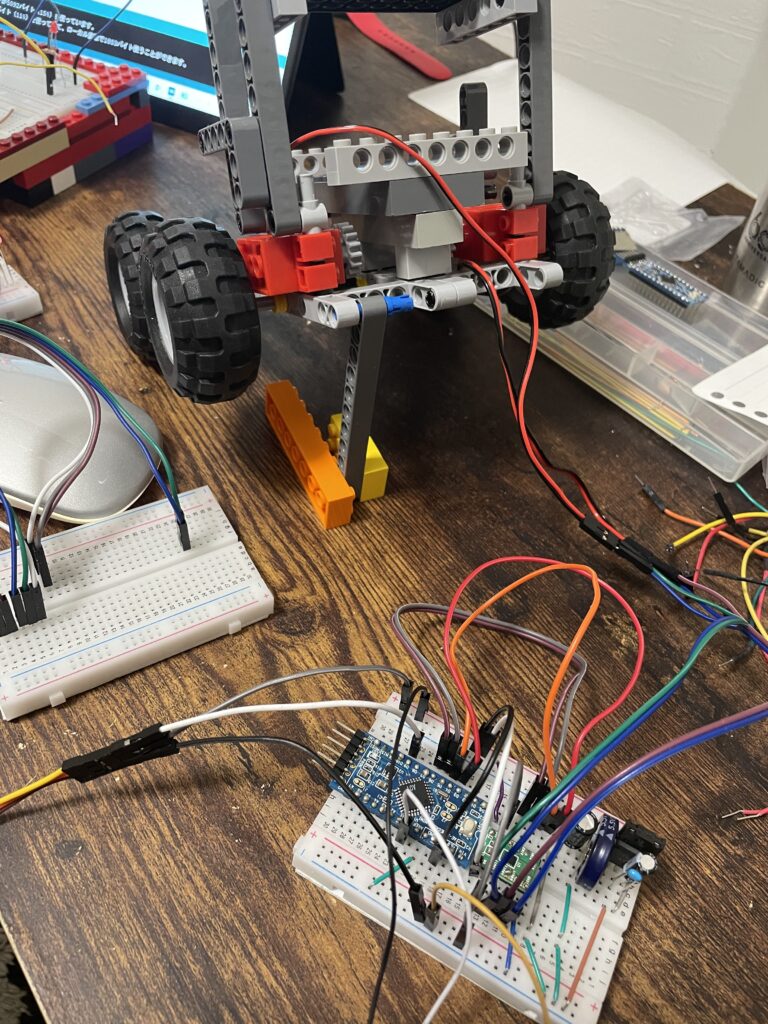
Arduino Unoによる制御系の確立
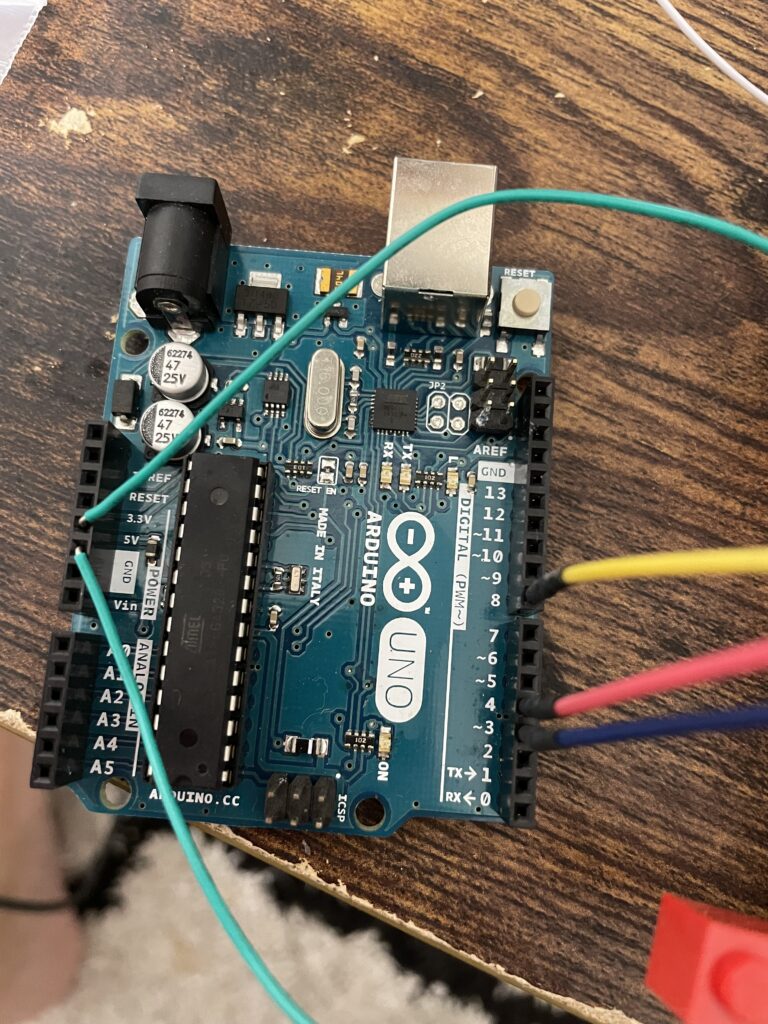
開発の第一歩は、メインマイコンに信頼性の高い Arduino Uno を選ぶことから始まりました。
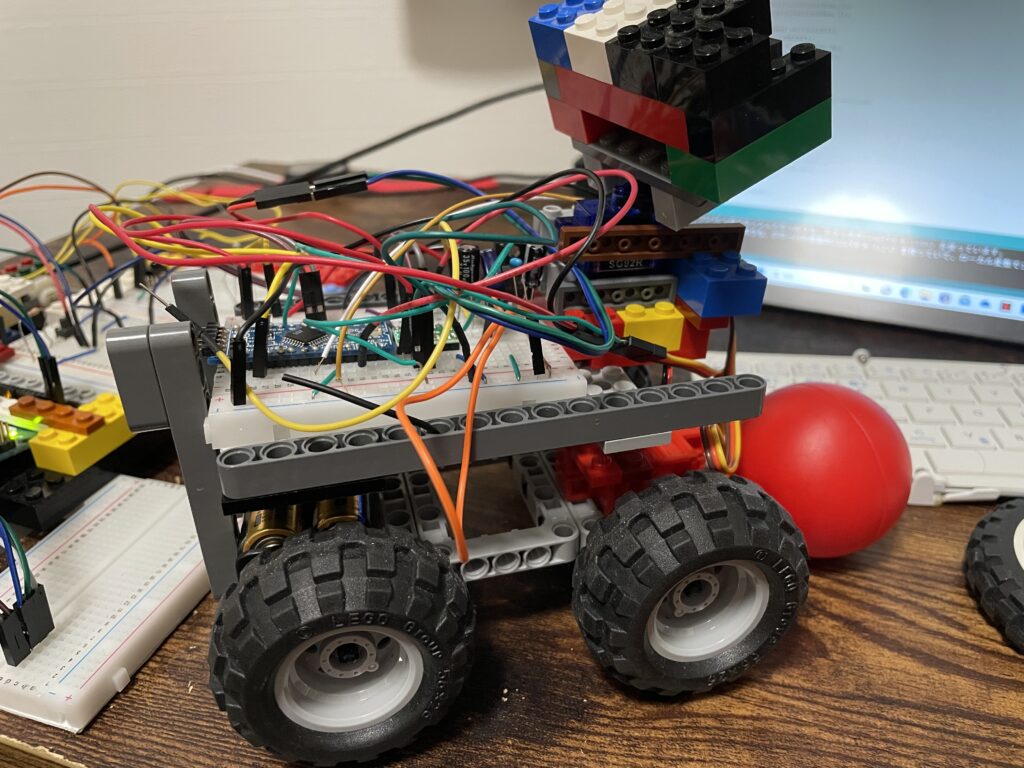
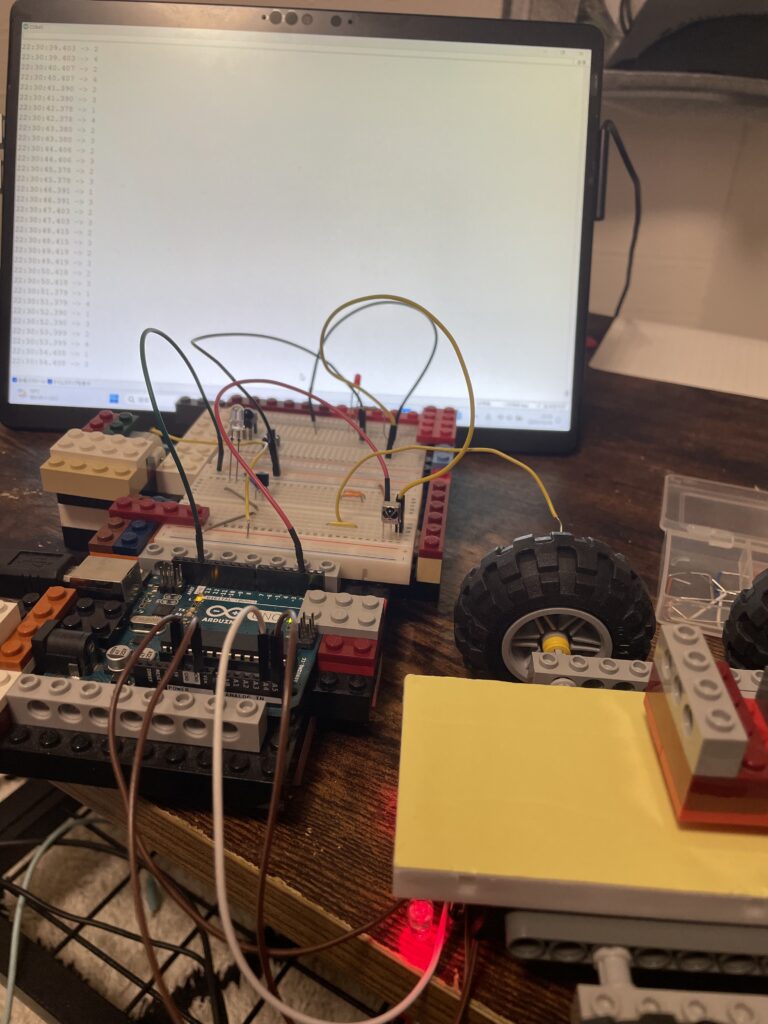
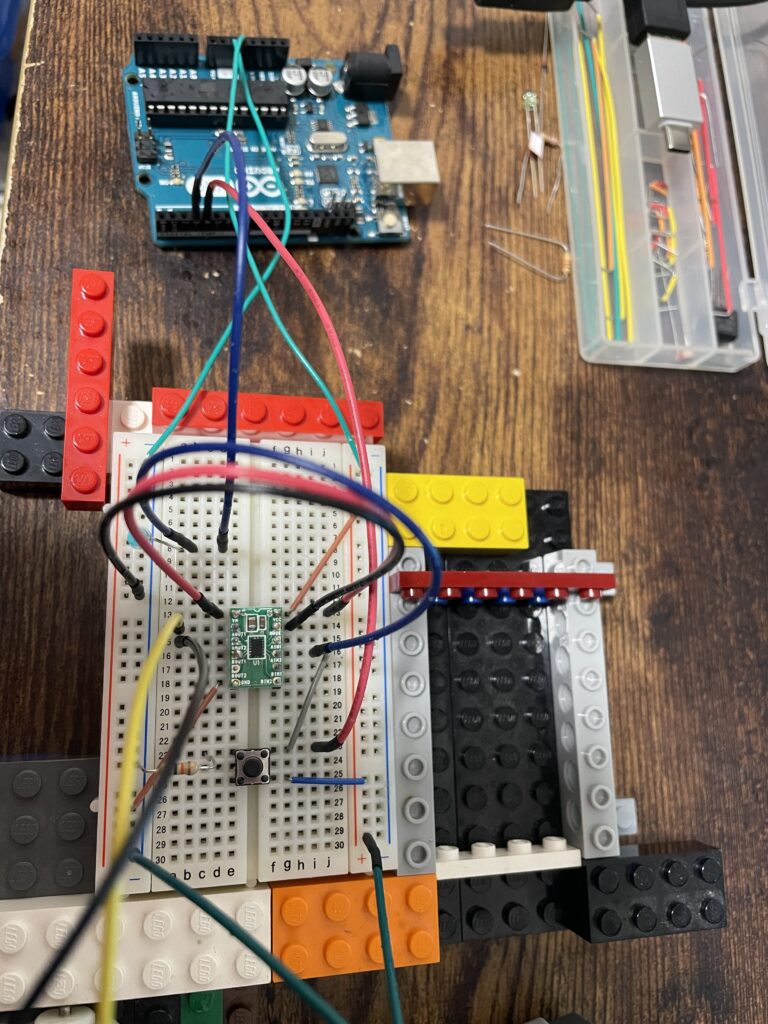
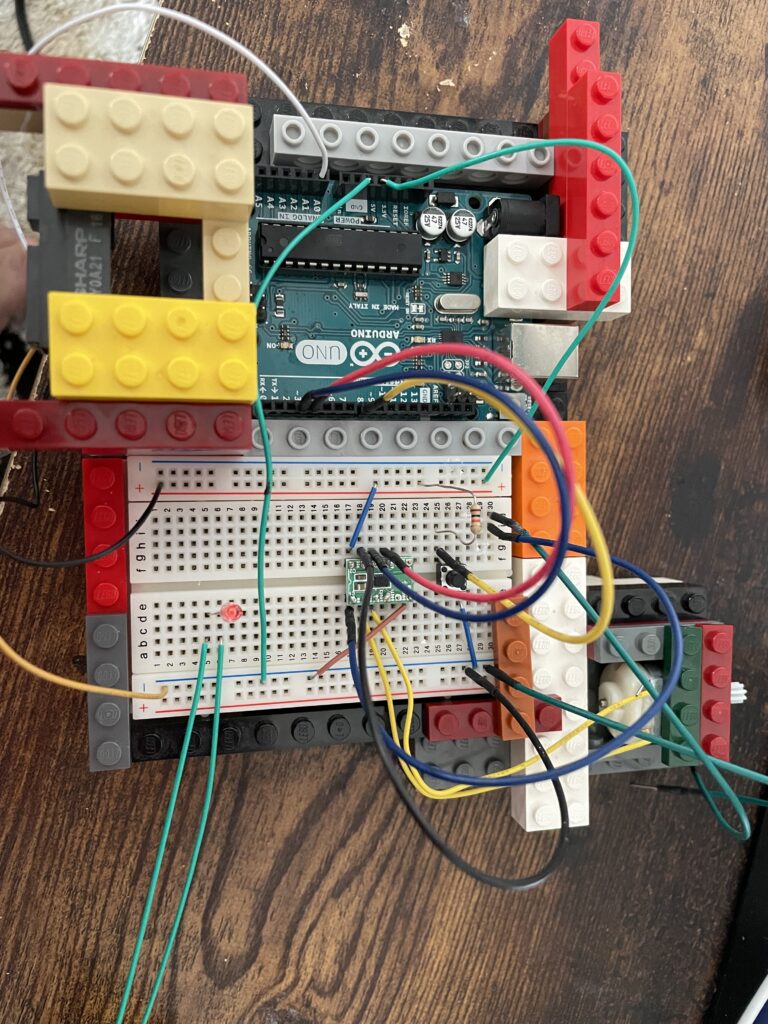
- ユーザーインターフェースの基礎:まずは「人間との対話」を可能にするため、タクトスイッチとLEDを配置。シリアルモニタ(画像2背景)に流れるログを確認しながら、プログラムが意図したループ内にあるか、センサー値が正しく取れているかを執拗にデバッグしました。
- 「脳」と「体」の接続:ブレッドボード上に、Legoのパワーを制御するための基幹回路を構築していきます。
モータードライバーとの格闘:物理的なパズル
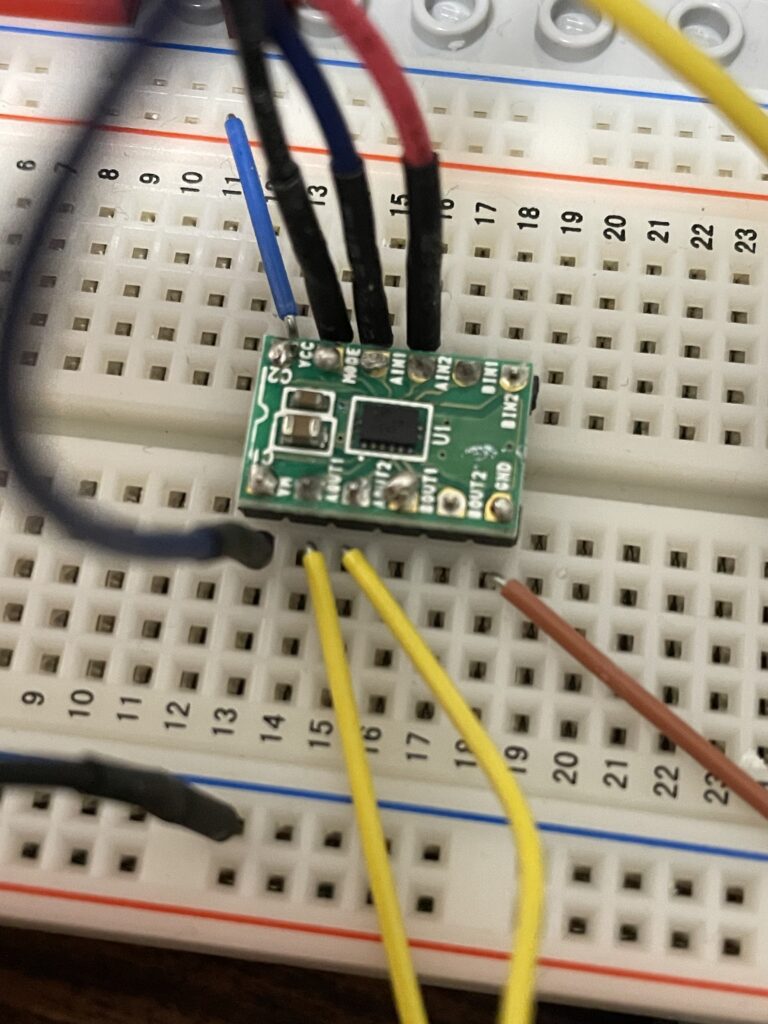
Arduinoの微弱な信号では、Legoのモーターを力強く動かすことはできません。
- 小型モータードライバーの導入:中央に鎮座する緑色の基板は、DCモータードライバーモジュールです。
- PWMによる速度制御:パルス幅変調(PWM)を用いて、低速時のトルク維持と高速走行の安定性を両立。ジャンパーワイヤが入り乱れる配線作業は、まさに物理的なパズルでした。
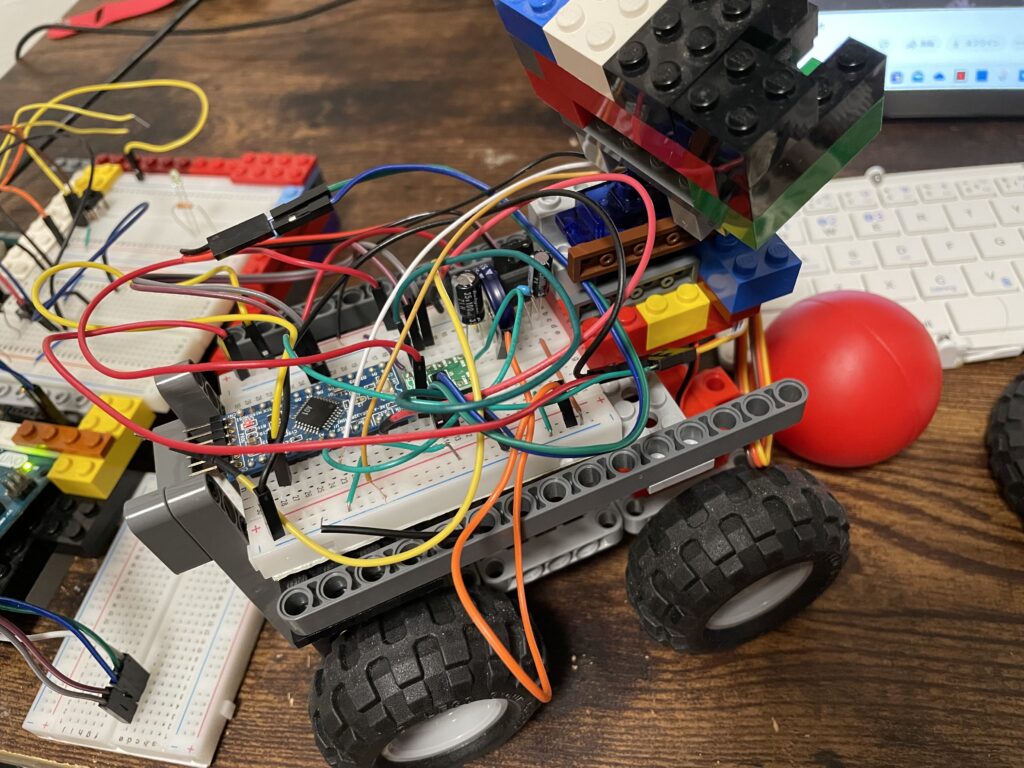
「視覚」と「表現力」の拡張:Legoテクニックの機動力
ロボットが壁を避け、自律的に動くためには、高精度な「視覚」が欠かせません。
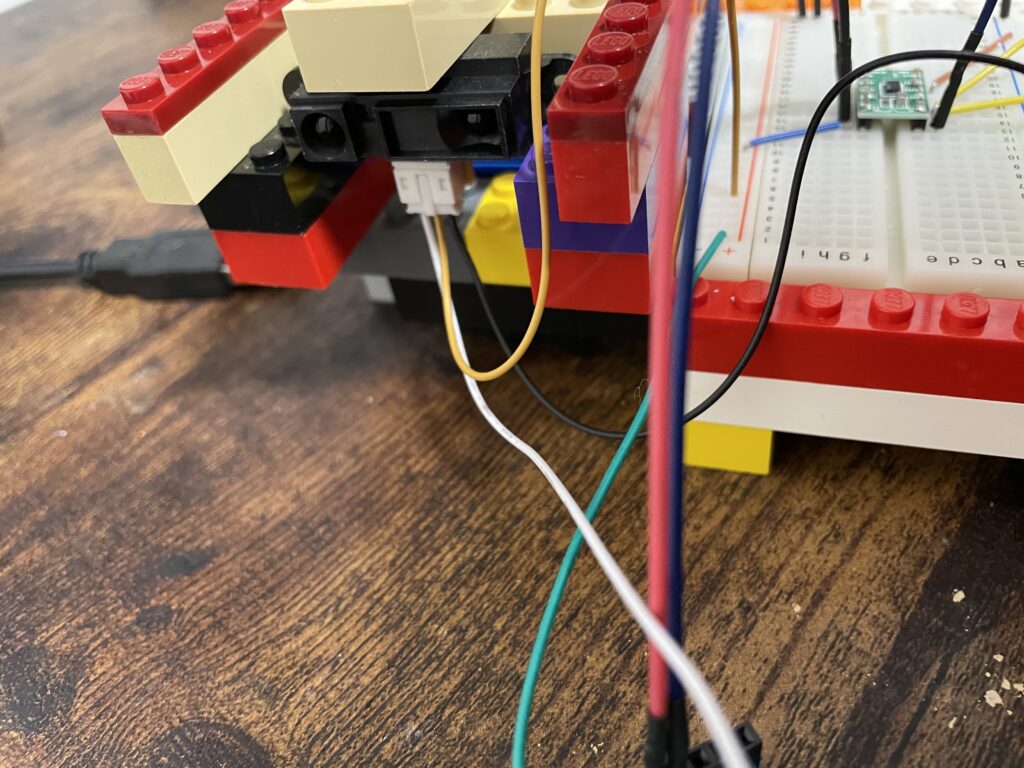
- 赤外線距離センサーの搭載:SHARP製の赤外線距離センサー(GP2Y0Aシリーズ)を採用。Legoテクニックパーツの柔軟性を活かし、ミリ単位でセンサー位置を調整可能なマウントを構築しました。
- スキャン動作の実装:青い小型サーボモーター(SG90)を統合。センサーを左右にスイングさせることで、立ち止まったまま周囲180度を確認する「スキャン動作」を手に入れました。単なる衝突回避から「進路探索」へと、知能が一段階進化した瞬間です。
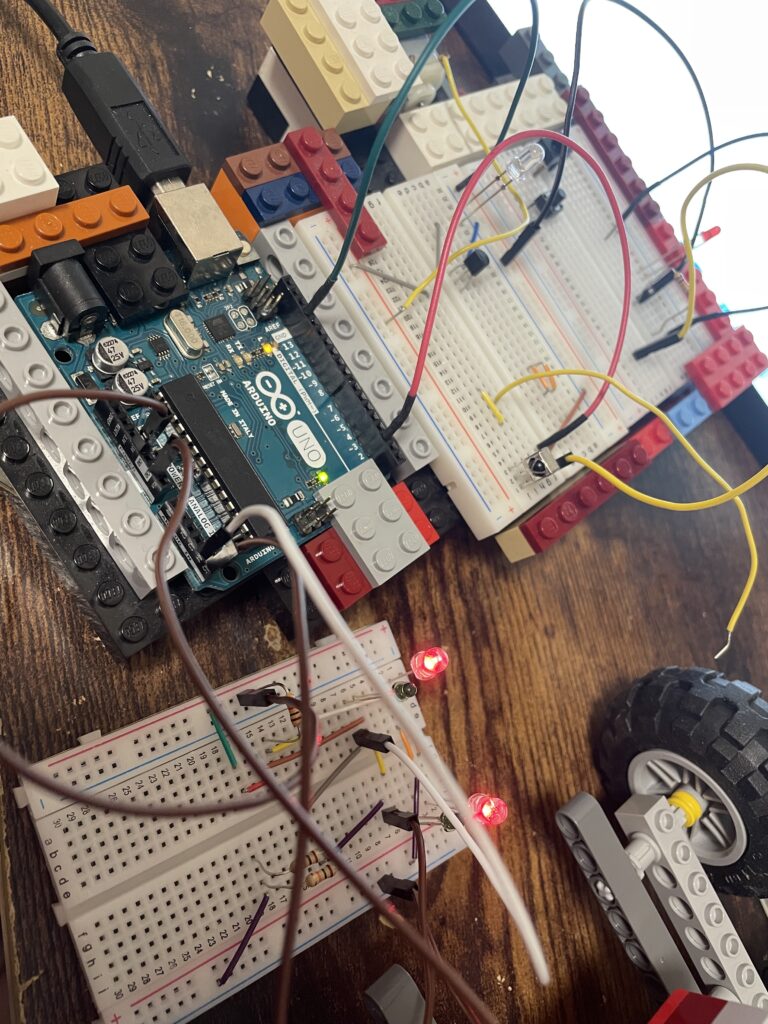
電源の安定化:見えないノイズとの戦い
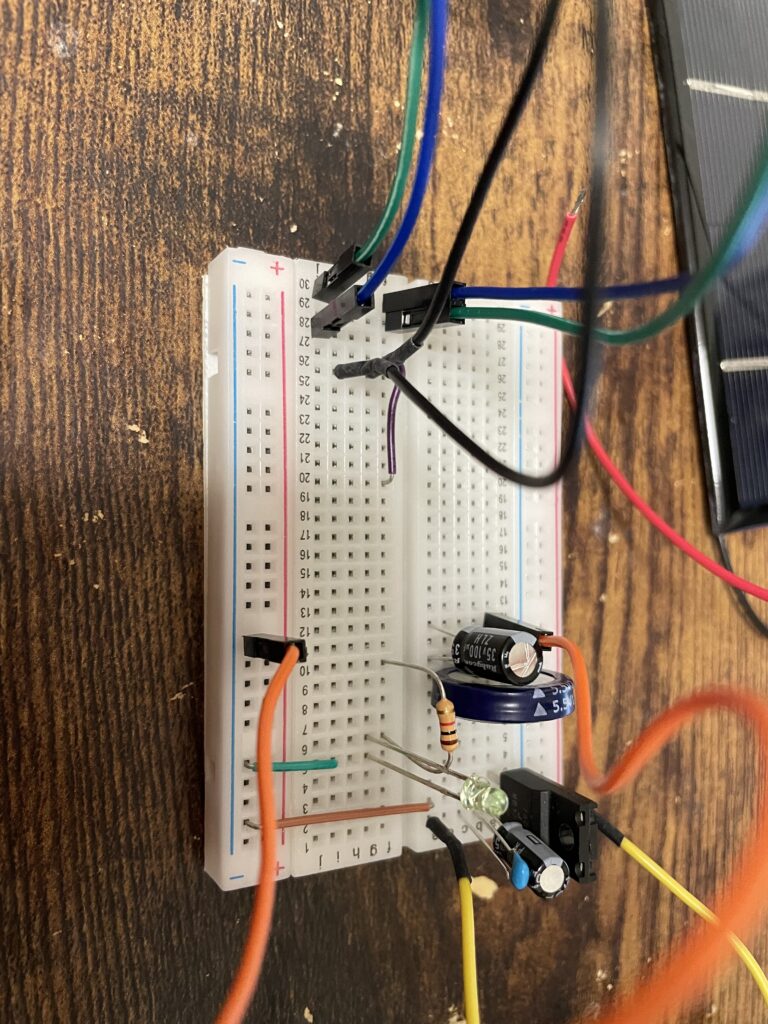
PCのUSB給電から切り離し、完全に独立した「自律型」として動作させる段階で、最大の壁にぶつかりました。どうやって電源を残すのかが素人には分からずなんとなくで進めていました。
- デカップリング回路の構築:大型の電解コンデンサやレギュレータを導入。大電流を消費するモーター用電源と、繊細な計算を行うArduino用の電源を切り分けることで、システムの安定稼働を実現しました。
ただこの方法が合っているかはわかりませんでした(多分使い方は間違っています💦)。
今後はその辺りも勉強しながら学んでいきます。
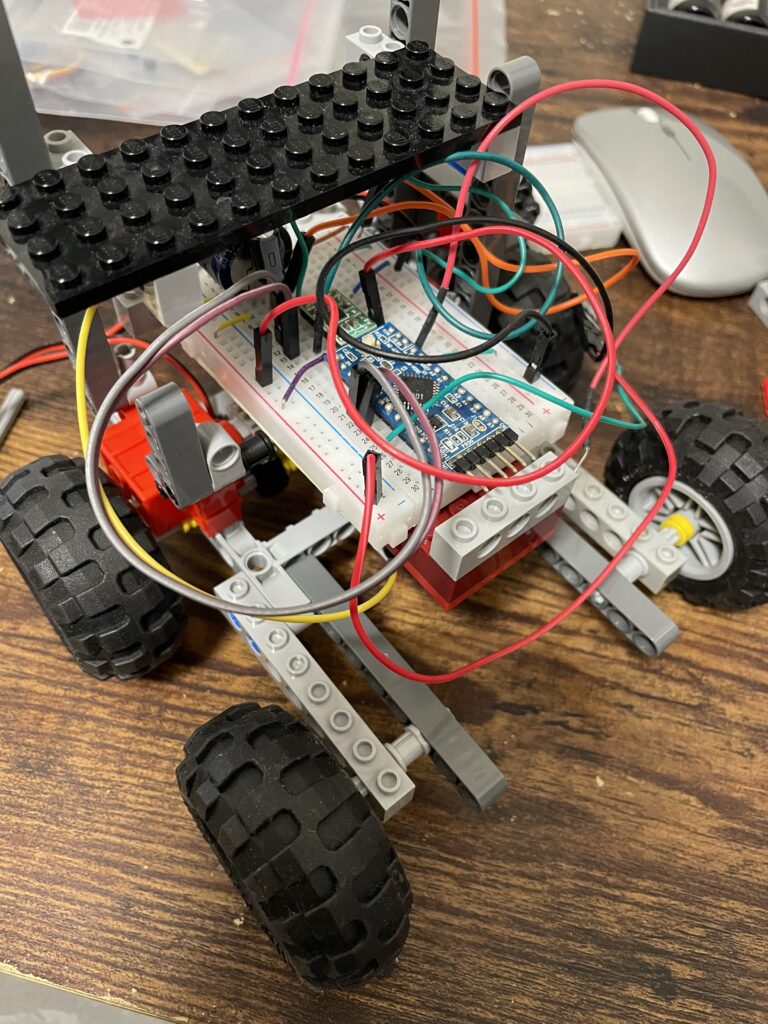
小型化とプロダクト化:AE-ATMEGA328-MINIへの移行
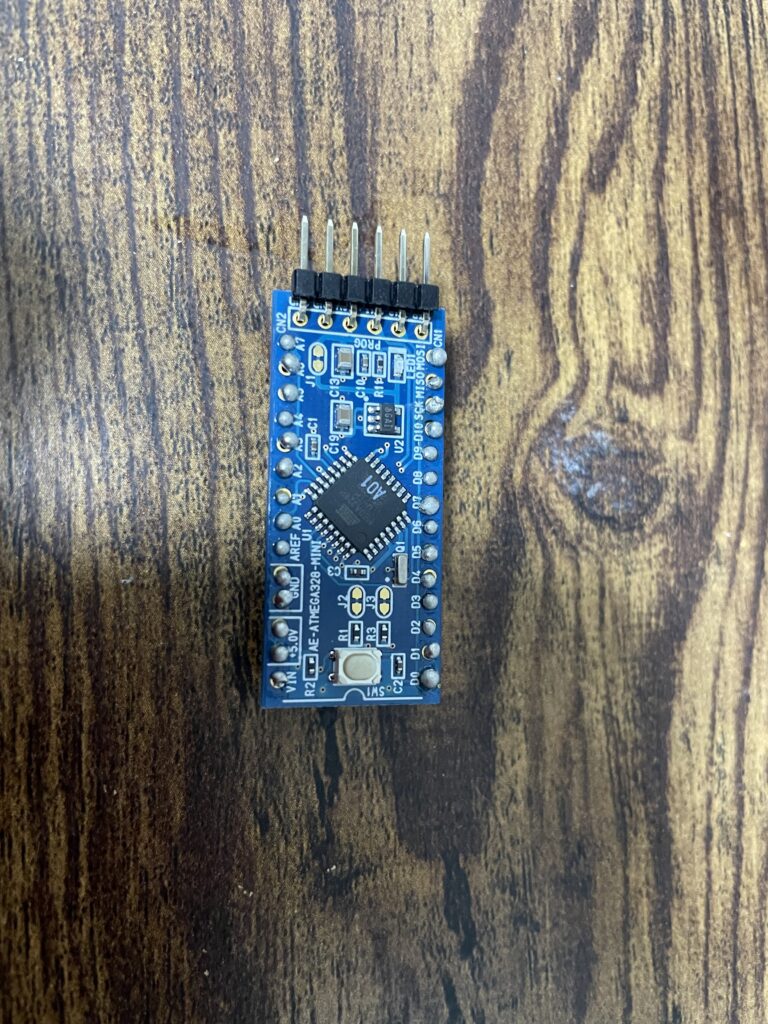
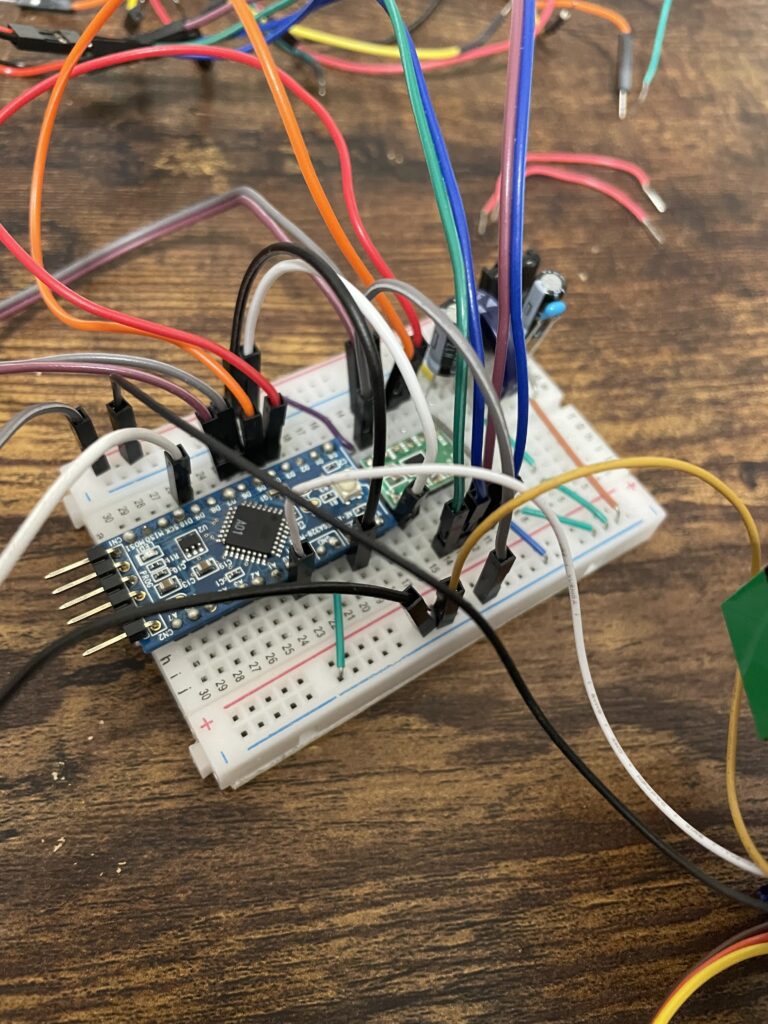
開発のクライマックスは、ロボットの「小型化」です。Legoのシャーシ内部にすべてを収めるため、巨大なUnoを卒業しました。
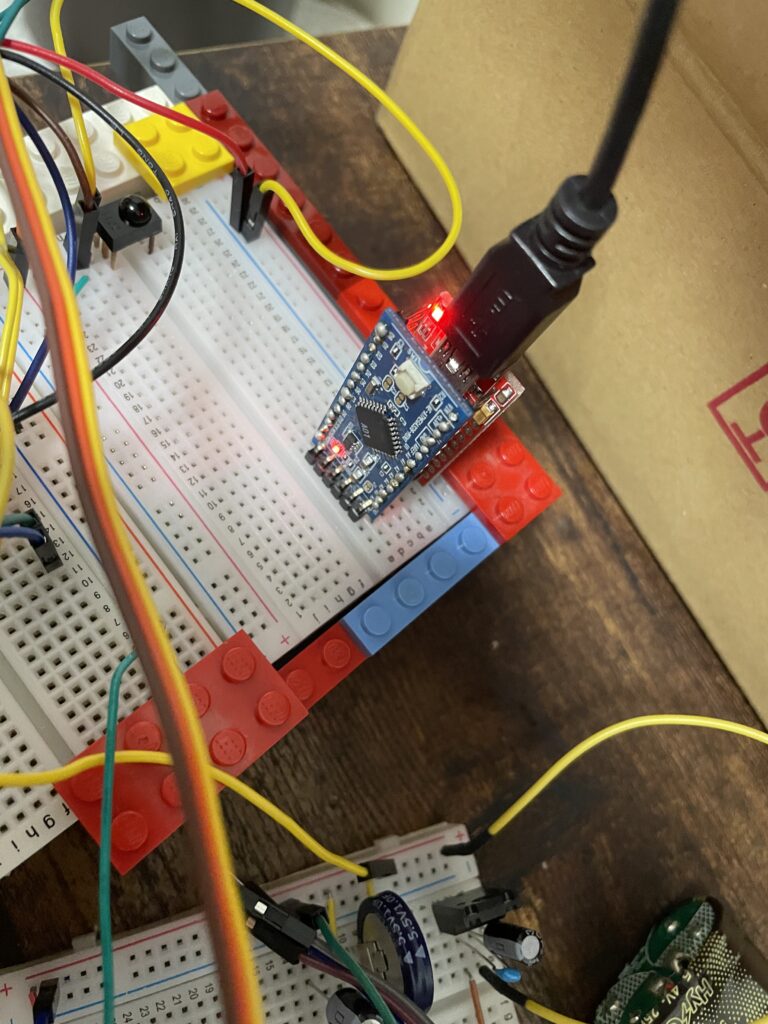
- 極小マイコンボードの採用:秋月電子の「AE-ATMEGA328-MINI」を導入。Unoの心臓部を親指サイズに凝縮したこのボードを、FTDI変換アダプタでプログラムを書き込みながら調整します。
- シャーシへの完全統合:ブレッドボードを小型化し、Legoのフレーム内に整然と収めていきます。バッテリーを含め、すべてのパーツを車体にパッキングすることで、ついに外の世界を自由に駆け巡る「自律型ロボット」が完成しました。
終わりなき「自由研究」
Legoという「何度でもやり直せる素材」と、Arduinoという「無限の可能性を持つツール」を組み合わせることで、それらすべての失敗を「学び」に変えることができました。自分の手が届く範囲で、これほどまでに複雑で愛らしいシステムを構築できる喜び。これこそが、電子工作とレゴが融合した「大人の自由研究」です。
今後は、この実機のデータをデジタルツインとして活用するため、次の記事で書いている「Unityとの連携」を目標としています。物理世界を飛び出したロボットが、仮想世界でどう進化するのか。ぜひご期待ください。
\ 最新情報をチェック /